半实物实时仿真平台
A-HILK(Harware In Loop Kit)半实物实时仿真平台是用于复杂装备硬件在回路的仿真试验系统开发和运行控制平台,支持以低代码、积木式快速完成半实物仿真试验系统的开发、试验部署、运行管理到分析评估等过程。
A-HILK采用FMI/FMU标准模型接口和分布实时仿真架构,支持MATLAB/Sim-ulink、C/C++、Maplesim、Dymola、Modelica等多种流行的仿真建模工具和编程语言开发模型,封装为可重用的模块化仿真资源;并通过实时仿真引擎以及相关的微服务组件,将仿真模型、仿真设备、试验参数等仿真资源进行集成装配,快速构成可实时运行的半实物仿真试验系统。
A-HILK支持各种接口的实装硬件产品以及仿真模拟器设备,支持各种分布交互仿真通讯协议,支持多模型、多设备、分布式并行仿真,构建MIL/SIL/HIL/DIL、以及LVC仿真系统。
技术特点
l FMI/FMU标准模型接口、逻辑设备资源库;
l 性能优化的高效实时仿真引擎;
l 可扩展的组件化微服务;
l 界面友好的仿真过程监控及数据可视化面板;
l 支持分布式多模型、多设备并行协同仿真;
l 参数化试验系统,可配置的模型参数、接口参数、及任务参数;
l 开放工业标准体系,多厂商、及国产化硬件及软件支持;
l 支持DDS/HLA等标准,异构系统互联,构建LVC联合仿真;
l 精简化、全自主可控仿真引擎,不依赖任何大型仿真平台,可构造高度定制化仿真试验系统。
工作流程
l 仿真模型导出为FMU标准模型资源组件,并导入仿真系统资源库;
l 根据试验大纲进行仿真系统组成方案设计,构建仿真试验系统,配置试验参数;
l 打开仿真试验项目,下载到实时仿真目标机,启动运行和试验过程监控;
l 试验结束后,上传试验数据,查看分析,生成试验报告

运行模式
单机实时仿真运行
一台仿真控制台和一台实时仿真机,连接少量仿真设备和产品组件,适用于单装备制导半实物仿真等小规模仿真系统
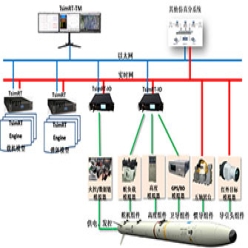
多机分布式实时仿真运行
用于多装备、多目标、复杂环境的大型多装备协同、虚实结合的仿真试验系统
单机/多机数学仿真运行
用于无硬件设备在回路的数学仿真试验,支持多模型、实时/超实时仿真,支持人工单次试验以及无人值守的大样本参数批处理试验运行
LVC联合仿真运行
半实物仿真系统以子系统方式,接入大型LVC联合仿真系统,作为复杂战术仿真系统中的部分装备仿真单元,实现复杂战场环境下的人在回路、多装备、模拟器在回路的LVC联合仿真运行